„Laboratórium 2 - 9. Mérés ellenőrző kérdései” változatai közötti eltérés
a →2. Adja meg a PD kimeneti feszültségét (nemlinearizált alak).: Szerintem rossz volt a megoldás mivel K konstans nem Kd, K a segédlet alapján közelitőleg 1 lehet |
|||
| (18 közbenső módosítás, amit 8 másik szerkesztő végzett, nincs mutatva) | |||
| 7. sor: | 7. sor: | ||
==1. Rajzolja fel a PLL tömbvázlatát.== | ==1. Rajzolja fel a PLL tömbvázlatát.== | ||
A PLL egy olyan szabályozási kör, amely a kimeneti jelét egy bemeneti jelhez (referencia jel) | A PLL egy olyan szabályozási kör, amely a kimeneti jelét egy bemeneti jelhez (referencia jel) képest képes szinkronizálni mind frekvenciában, mind fázisban. | ||
[[ | [[File:Labor2 kép13.jpg|700px]] | ||
Részegységek: | Részegységek: | ||
| 17. sor: | 17. sor: | ||
==2. Adja meg a PD kimeneti feszültségét (nemlinearizált alak).== | ==2. Adja meg a PD kimeneti feszültségét (nemlinearizált alak).== | ||
Cos és sin jelek szorzatából adódik a következő, trigonometrikus összefüggés felhasználásával: | |||
<math> u_d(t)=0.5 \cdot | <math> u_d(t)=0.5 \cdot K \cdot U_{1p} \cdot U_{2p} \cdot (\sin(2 \omega t + \theta_{2} ) + \sin(\Theta_e)) </math> | ||
Aluláteresztővel kiszűrve a magasabb frekvenciás komponenst: | |||
<math> u_d(t)=0.5 \cdot K \cdot U_{1p} \cdot U_{2p} \cdot \sin(\Theta_e) </math> | |||
Összevonva a a konstansokat adódik hogy: | |||
<math> u_d(t)= K_{D} \cdot \sin(\Theta_e) </math> | |||
<math> K_{D} \approx \frac{U_{1p} \cdot U_{2p}}{2} </math> | |||
Paraméterek: | Paraméterek: | ||
*<math>U_{1p}</math> és <math>U_{2p}</math> - A fázisdetektor bemeneteire juttatott jelek amplitúdói. | *<math>U_{1p}</math> és <math>U_{2p}</math> - A fázisdetektor bemeneteire juttatott jelek amplitúdói. | ||
*<math>K</math> - konstans. | |||
*<math>K_d</math> - A fázisdetektorra jellemző konstans. | *<math>K_d</math> - A fázisdetektorra jellemző konstans. | ||
*<math>\Theta_e</math> - A PD két bemeneti jel fáziskülönbsége. | *<math>\Theta_e</math> - A PD két bemeneti jel fáziskülönbsége (hallgatólagosan az idő függvénye). | ||
*<math>U_d</math> - A fázisdetektorra kimeneti feszültsége. | |||
==3. Adja meg a VCO kimeneti fázisát a komplex frekvenciatartományban.== | ==3. Adja meg a VCO kimeneti fázisát a komplex frekvenciatartományban.== | ||
| 40. sor: | 52. sor: | ||
==4. Rajzolja fel a hurokszűrő kapcsolási rajzát és adja meg az átviteli függvényét.== | ==4. Rajzolja fel a hurokszűrő kapcsolási rajzát és adja meg az átviteli függvényét.== | ||
[[ | [[File:Labor2 kép14.jpg]] | ||
<math> F(s) = \frac {1+sC(R_1+R_2)}{sR_1C} = \frac {1+s\tau_1}{s\tau_2} </math> | <math> F(s) = \frac {1+sC(R_1+R_2)}{sR_1C} = \frac {1+s\tau_1}{s\tau_2} </math> | ||
| 48. sor: | 60. sor: | ||
<math> F(s) = \frac {1+sC(R_1+R_2)}{sR_1C} = \frac {1+s\tau_1}{s\tau_2} </math> | <math> F(s) = \frac {1+sC(R_1+R_2)}{sR_1C} = \frac {1+s\tau_1}{s\tau_2} </math> | ||
[[ | [[File:Labor2 kép15.jpg|700px]] | ||
==6. Rajzolja fel a PLL nemlineáris alapsávi modelljét.== | ==6. Rajzolja fel a PLL nemlineáris alapsávi modelljét.== | ||
[[ | [[File:Labor2 kép16.jpg|700px]] | ||
==7. Rajzolja fel a PD nemlineáris karakterisztikáját és azon határozza meg a munkapontot.== | ==7. Rajzolja fel a PD nemlineáris karakterisztikáját és azon határozza meg a munkapontot.== | ||
[[ | [[File:Labor2 kép17.jpg]] | ||
Ha a fázishiba megnő, akkor ennek hatására megnő PD kimenetén a feszültség, majd a VCO pillanatnyi kimeneti frekvenciája, ami egyben a PD egyik bemeneti jele. Ennek a jelnek úgy kell hatnia, hogy a fázishiba csökkenjen, ellenkező esetben nem jön létre fáziszárt állapot. A fenti elv a alapján megvizsgálva a PD nemlineáris karakterisztikáját 0-ban és <math>\pi</math>-ben megállapítható, hogy a munkapont 0-ban van, mivel csak erre a pontra teljesülnek az előírások. | Ha a fázishiba megnő, akkor ennek hatására megnő PD kimenetén a feszültség, majd a VCO pillanatnyi kimeneti frekvenciája, ami egyben a PD egyik bemeneti jele. Ennek a jelnek úgy kell hatnia, hogy a fázishiba csökkenjen, ellenkező esetben nem jön létre fáziszárt állapot. A fenti elv a alapján megvizsgálva a PD nemlineáris karakterisztikáját 0-ban és <math>\pi</math>-ben megállapítható, hogy a munkapont 0-ban van, mivel csak erre a pontra teljesülnek az előírások. | ||
==8. Adja meg a PLL | ==8. Adja meg a PLL bemenete és kimenete közti fáziskülönbség értékét. (aktív hurokszűrőre és fáziszárt állapotra értendő).== | ||
Mivel az alkalmazott aktív hurokszűrő erősítése nagyon nagy (kb. 200 000, mert nincs DC visszacsatolás), ezért a bementén csak közel 0 V DC feszültség lehet. A hurokszűrő bemenete azonban egyben a PD kimenete is. | |||
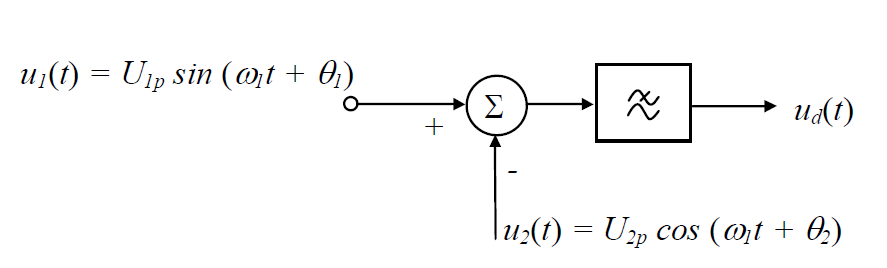
Az ideális szorzóval megvalósított PD blokkvázlata: | |||
[[Media:Labor2_Mérés9_PD_blokkvázlat.PNG|500px]] | |||
Az ideális szorzóval megvalósított PD karakterisztikája: | |||
<math>u_d(t) = 0,5 \cdot K \cdot U_{1p} \cdot U_{2p} \cdot \sin{\theta_e}</math> | |||
Ezek szerint a PD kimenetén csak akkor lehet nulla fázishiba <math>( \theta_e = 0 )</math> mellett nulla feszültség, ha az egyik bemeneti jel szinusz, másik pedig koszinusz, azaz ha a két bemeneti jel között a fáziskülönbség <math>\pi/2</math>. | |||
==9. Adja meg a PD kimeneti feszültségét a lineáris alapsávi modellben kis <math> \Theta_e </math> esetén (nem kell levezetni).== | ==9. Adja meg a PD kimeneti feszültségét a lineáris alapsávi modellben kis <math> \Theta_e </math> esetén (nem kell levezetni).== | ||
| 73. sor: | 96. sor: | ||
==10. Rajzolja fel a PLL lineáris alpsávi modelljét.== | ==10. Rajzolja fel a PLL lineáris alpsávi modelljét.== | ||
[[ | [[File:Labor2 kép18.jpg|700px]] | ||
==11. Adja meg a hurokerősítés egyenletét (legegyszerűbb forma).== | ==11. Adja meg a hurokerősítés egyenletét (legegyszerűbb forma).== | ||
| 83. sor: | 106. sor: | ||
*<math>F(s)</math> - A hurokszűrő átviteli függvénye. | *<math>F(s)</math> - A hurokszűrő átviteli függvénye. | ||
*<math>K_d</math> - A fázisdetektor átviteli tényezője. | *<math>K_d</math> - A fázisdetektor átviteli tényezője. | ||
*<math> | *<math>K_v</math> - A VCO átviteli tényezője. | ||
==12. Adja meg a PLL zárthurkú átviteli függvényét (legegyszerűbb forma).== | ==12. Adja meg a PLL zárthurkú átviteli függvényét (legegyszerűbb forma).== | ||
| 104. sor: | 127. sor: | ||
==15. Rajzolja fel a hurokerősítés törtvonalas Bode-diagramját (<math> \zeta = 1 </math>).== | ==15. Rajzolja fel a hurokerősítés törtvonalas Bode-diagramját (<math> \zeta = 1 </math>).== | ||
[[ | *<math>\omega_B = 2 \cdot \zeta \cdot \omega_n</math> - Zárthurkú sávszélesség. | ||
*<math>\zeta</math> - Csillapítási tényező. | |||
*<math>\omega_n</math> - Pólusfrekvencia. | |||
[[File:Labor2 kép19.jpg|700px]] | |||
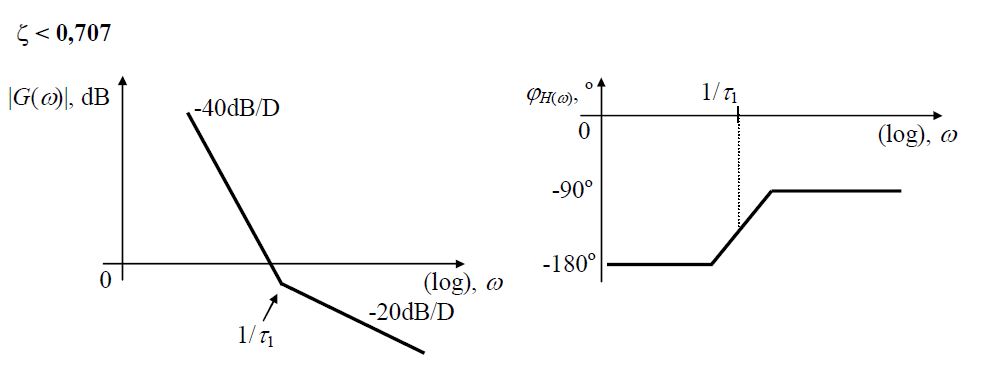
== 16. Rajzolja fel a hurokerősítés törtvonalas Bode-diagramját (<math> \zeta < 0,707 </math>). == | == 16. Rajzolja fel a hurokerősítés törtvonalas Bode-diagramját (<math> \zeta < 0,707 </math>). == | ||
[[Media:Labor2_mérés9_ábra1.JPG|700px]] | |||
==17. Rajzolja fel a zárthurkú átviteli függvény Bode-diagramját különböző <math> \zeta </math>-ra.== | ==17. Rajzolja fel a zárthurkú átviteli függvény Bode-diagramját különböző <math> \zeta </math>-ra.== | ||
[[ | [[File:Labor2 kép20.jpg|700px]] | ||
==18. Rajzolja fel a hibafüggvény Bode-diagramját különböző <math> \zeta </math>-k esetén.== | ==18. Rajzolja fel a hibafüggvény Bode-diagramját különböző <math> \zeta </math>-k esetén.== | ||
[[ | [[File:Labor2 kép21.jpg|700px]] | ||
==19. Adja meg a PLL tervezési paramétereit és, hogy az egyes paraméterek mit szabnak meg.== | ==19. Adja meg a PLL tervezési paramétereit és, hogy az egyes paraméterek mit szabnak meg.== | ||
* <math> \tau_1 </math> | |||
* <math> \tau_2 </math> | Paraméterek: | ||
* <math> G_0 </math> | * <math> \tau_1 </math> - A sávszélességet <math>(\omega_n)</math> -t szabja meg, | ||
* <math> \tau_2 </math> - A stabilitási tulajdonságokat <math>(\zeta )</math> -t, illetve a dinamikát szabja meg. | |||
* <math> G_0 </math> - A követési tulajdonságokat <math>( \Theta_e )</math> -t szabja meg. Az alkalmazott aktív szűrőre: <math>G_0 = \infty</math> | |||
==20. Adja meg a PLL frekvenciatartományait.== | ==20. Adja meg a PLL frekvenciatartományait.== | ||
[[ | [[File:Labor2 kép22.jpg|350px]] | ||
A PLL frekvenciatartományai: | |||
*<math>2 \Delta \omega_H</math> '''Követési tartomány''' (HOLD-IN): Az a frekvenciatartomány, amelyen belül a PLL követni képes a bemeneti jel fázisát, miközben a bemeneti frekvencia az <math>\omega_0</math> frekvenciától távolodik. Ezt a követési tartományt a hurokelemek telítésbe jutása korlátozza. (Tehát ha már beállt a fáziszárt állapot és tekerjük a frekit, ezen belül tudja követni) | |||
*<math>2 \Delta \omega_P</math> '''Befogási tartomány''' (PULL-IN): Az a frekvencia tartomány, amelyen belülre kerülve a PLL képes elérni a fáziszárt állapotot. (Ha még nincs fáziszárt állapotban, ezen belül tudja elkapni) | |||
Általában a követési tartomány nagyobb, de nem kell meglepődni, ha a mérésen egyforma. | |||
==21. Rajzolja fel az FM demodulátor tömbvázlatát.== | ==21. Rajzolja fel az FM demodulátor tömbvázlatát.== | ||
[[ | [[File:Labor2 kép23.jpg]] | ||
==22. Milyen tervezési feltételt kell az FM demodulátornak kielégítenie?== | ==22. Milyen tervezési feltételt kell az FM demodulátornak kielégítenie?== | ||
<math>\omega_n | <math>\omega_n</math> pólusfrekvencia <math>\geq </math> maximális modulációs frekvencia. | ||
==23. Rajzolja fel a PM demodulátor tömbvázlatát.== | ==23. Rajzolja fel a PM demodulátor tömbvázlatát.== | ||
[[ | [[File:Labor2 kép24.jpg]] | ||
==24. Milyen tervezési feltételt kell a PM demodulátornak kielégítenie?== | ==24. Milyen tervezési feltételt kell a PM demodulátornak kielégítenie?== | ||
<math>\omega_n \leq </math> minimális modulációs frekvencia | <math>\omega_n</math> pólusfrekvencia <math> \leq </math> minimális modulációs frekvencia. | ||
==25. Rajzolja fel az FSK modulált jel hullámformáját.== | ==25. Rajzolja fel az FSK modulált jel hullámformáját.== | ||
[[ | [[File:Labor2 kép25.jpg]] | ||
==26. Rajzolja fel a rendszer válaszát az időtartományban a VCO perturbációjára, ha <math>\zeta>1</math>, <math>\zeta=1</math>, <math>\zeta < 1</math>.== | ==26. Rajzolja fel a rendszer válaszát az időtartományban a VCO perturbációjára, ha <math>\zeta>1</math>, <math>\zeta=1</math>, <math>\zeta < 1</math>.== | ||
[[ | [[File:Labor2 kép26.jpg|600px]] | ||
[[ | [[Kategória:Villamosmérnök]] | ||
A lap jelenlegi, 2023. március 25., 19:34-kori változata
1. Rajzolja fel a PLL tömbvázlatát.
A PLL egy olyan szabályozási kör, amely a kimeneti jelét egy bemeneti jelhez (referencia jel) képest képes szinkronizálni mind frekvenciában, mind fázisban.

Részegységek:
- Phase Detector: A be- és kimeneti jel fázisát hasonlítja össze és a fáziskülönbséggel arányos feszültséget állít elő.
- Hurokszűrő: Kiszűri az AC komponensét.
- VCO: A szűrő kimeneti jelétől lineárisan függő kimeneti frekvenciájú jelet állít elő.
2. Adja meg a PD kimeneti feszültségét (nemlinearizált alak).
Cos és sin jelek szorzatából adódik a következő, trigonometrikus összefüggés felhasználásával:
Aluláteresztővel kiszűrve a magasabb frekvenciás komponenst:
Összevonva a a konstansokat adódik hogy:
Paraméterek:
- és - A fázisdetektor bemeneteire juttatott jelek amplitúdói.
- - konstans.
- - A fázisdetektorra jellemző konstans.
- - A PD két bemeneti jel fáziskülönbsége (hallgatólagosan az idő függvénye).
- - A fázisdetektorra kimeneti feszültsége.
3. Adja meg a VCO kimeneti fázisát a komplex frekvenciatartományban.
Paraméterek:
- - A VCO átviteli tényezője.
- - A hurokszűrőből kimeneti jelének komplex amplitúdója.
- - A fázisdetektorra jellemző konstans.
- - A hurokszűrő átviteli függvénye.
- - A fázisdetektor bemeneti jeleinek fáziskülönbségének a komplex amplitúdója.
4. Rajzolja fel a hurokszűrő kapcsolási rajzát és adja meg az átviteli függvényét.

5. Adja meg a hurokszűrő átviteli függvényét és rajzolja fel a törtvonalas Bode-diagramját.

6. Rajzolja fel a PLL nemlineáris alapsávi modelljét.

7. Rajzolja fel a PD nemlineáris karakterisztikáját és azon határozza meg a munkapontot.

Ha a fázishiba megnő, akkor ennek hatására megnő PD kimenetén a feszültség, majd a VCO pillanatnyi kimeneti frekvenciája, ami egyben a PD egyik bemeneti jele. Ennek a jelnek úgy kell hatnia, hogy a fázishiba csökkenjen, ellenkező esetben nem jön létre fáziszárt állapot. A fenti elv a alapján megvizsgálva a PD nemlineáris karakterisztikáját 0-ban és -ben megállapítható, hogy a munkapont 0-ban van, mivel csak erre a pontra teljesülnek az előírások.
8. Adja meg a PLL bemenete és kimenete közti fáziskülönbség értékét. (aktív hurokszűrőre és fáziszárt állapotra értendő).
Mivel az alkalmazott aktív hurokszűrő erősítése nagyon nagy (kb. 200 000, mert nincs DC visszacsatolás), ezért a bementén csak közel 0 V DC feszültség lehet. A hurokszűrő bemenete azonban egyben a PD kimenete is.
Az ideális szorzóval megvalósított PD blokkvázlata:
{kind=link}
Az ideális szorzóval megvalósított PD karakterisztikája:
Ezek szerint a PD kimenetén csak akkor lehet nulla fázishiba mellett nulla feszültség, ha az egyik bemeneti jel szinusz, másik pedig koszinusz, azaz ha a két bemeneti jel között a fáziskülönbség .
9. Adja meg a PD kimeneti feszültségét a lineáris alapsávi modellben kis esetén (nem kell levezetni).
10. Rajzolja fel a PLL lineáris alpsávi modelljét.

11. Adja meg a hurokerősítés egyenletét (legegyszerűbb forma).
Paraméterek:
- - A hurokszűrő átviteli függvénye.
- - A fázisdetektor átviteli tényezője.
- - A VCO átviteli tényezője.
12. Adja meg a PLL zárthurkú átviteli függvényét (legegyszerűbb forma).
13. Adja meg a PLL hibafüggvényét (legegyszerűbb forma).
14. Adja meg a hurokerősítés egyenletét másodfokú hurokra (elsőfokú hurok, aktív hurokszűrővel).
Paraméterek:
- - Az aktív szűrő időállandói.
- - A fázisdetektor átviteli tényezője.
- - A VCO átviteli tényezője.
15. Rajzolja fel a hurokerősítés törtvonalas Bode-diagramját ().
- - Zárthurkú sávszélesség.
- - Csillapítási tényező.
- - Pólusfrekvencia.

16. Rajzolja fel a hurokerősítés törtvonalas Bode-diagramját ().
{kind=link}
17. Rajzolja fel a zárthurkú átviteli függvény Bode-diagramját különböző -ra.

18. Rajzolja fel a hibafüggvény Bode-diagramját különböző -k esetén.

19. Adja meg a PLL tervezési paramétereit és, hogy az egyes paraméterek mit szabnak meg.
Paraméterek:
- - A sávszélességet -t szabja meg,
- - A stabilitási tulajdonságokat -t, illetve a dinamikát szabja meg.
- - A követési tulajdonságokat -t szabja meg. Az alkalmazott aktív szűrőre:
20. Adja meg a PLL frekvenciatartományait.

A PLL frekvenciatartományai:
- Követési tartomány (HOLD-IN): Az a frekvenciatartomány, amelyen belül a PLL követni képes a bemeneti jel fázisát, miközben a bemeneti frekvencia az frekvenciától távolodik. Ezt a követési tartományt a hurokelemek telítésbe jutása korlátozza. (Tehát ha már beállt a fáziszárt állapot és tekerjük a frekit, ezen belül tudja követni)
- Befogási tartomány (PULL-IN): Az a frekvencia tartomány, amelyen belülre kerülve a PLL képes elérni a fáziszárt állapotot. (Ha még nincs fáziszárt állapotban, ezen belül tudja elkapni)
Általában a követési tartomány nagyobb, de nem kell meglepődni, ha a mérésen egyforma.
21. Rajzolja fel az FM demodulátor tömbvázlatát.

22. Milyen tervezési feltételt kell az FM demodulátornak kielégítenie?
pólusfrekvencia maximális modulációs frekvencia.
23. Rajzolja fel a PM demodulátor tömbvázlatát.

24. Milyen tervezési feltételt kell a PM demodulátornak kielégítenie?
pólusfrekvencia minimális modulációs frekvencia.
25. Rajzolja fel az FSK modulált jel hullámformáját.

26. Rajzolja fel a rendszer válaszát az időtartományban a VCO perturbációjára, ha , , .
